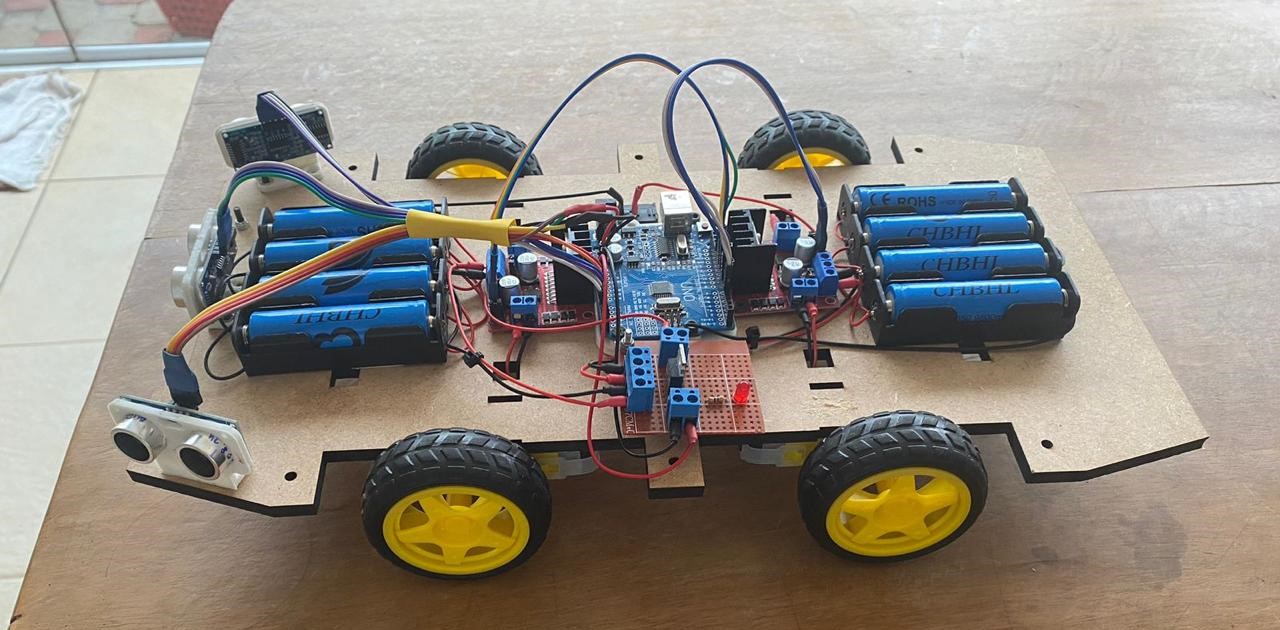
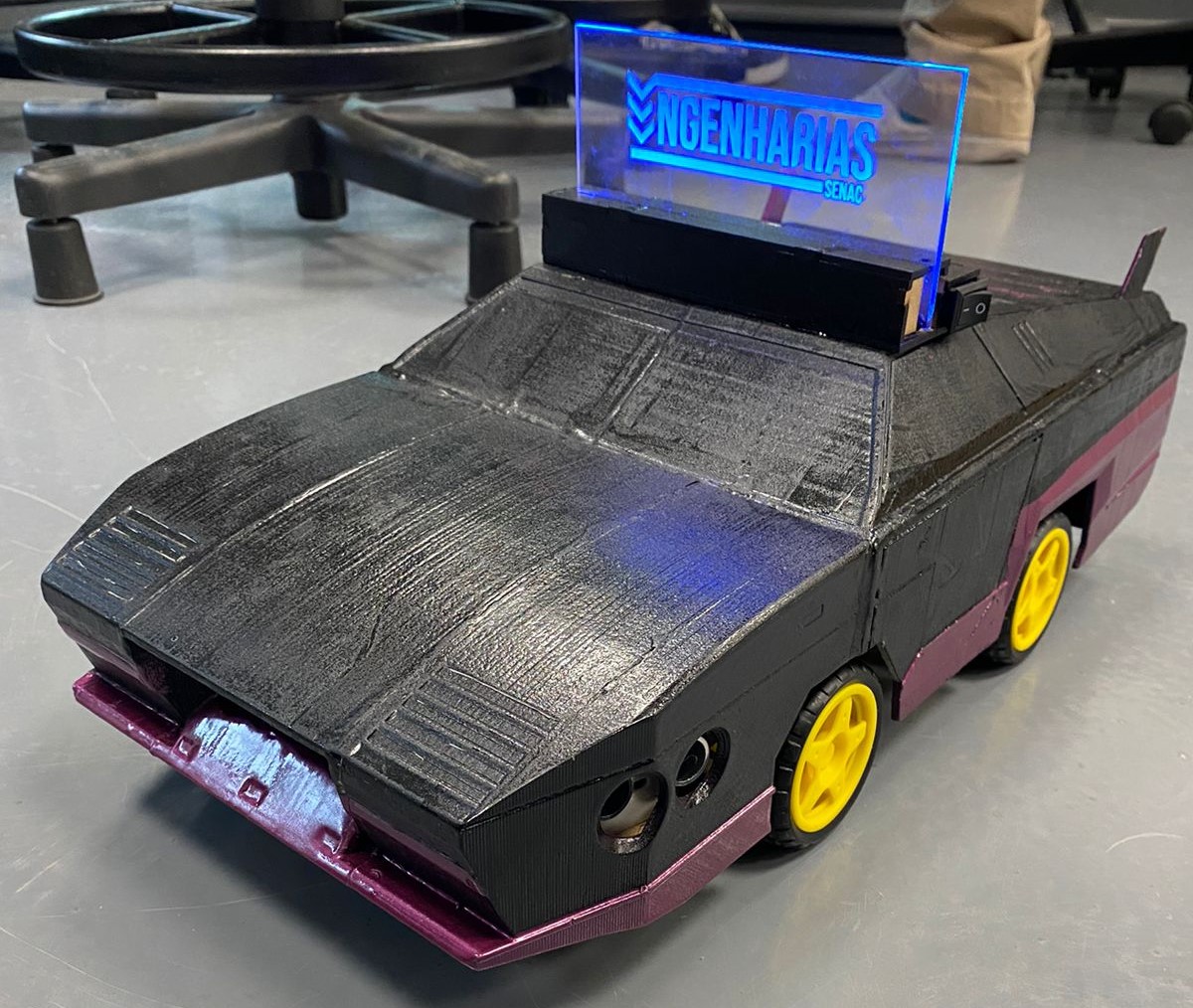
Um veículo autônomo em escala representa um grande avanço tecnológico da área automotiva. É um robô que, por meio de uma combinação de sensores, programas e sistemas de comunicação, são capazes de analisar o ambiente ao seu redor, seguir um trajeto e desviar de obstáculos de maneira independente.